
Robotic hands are good at picking up an object and putting it back down somewhere else, but the ability to move and manipulate an object while it remains in a robotic hand–that is, “in-hand manipulation,” such as rolling, sliding, and breaking and remaking contact with an object–is a trickier proposition.
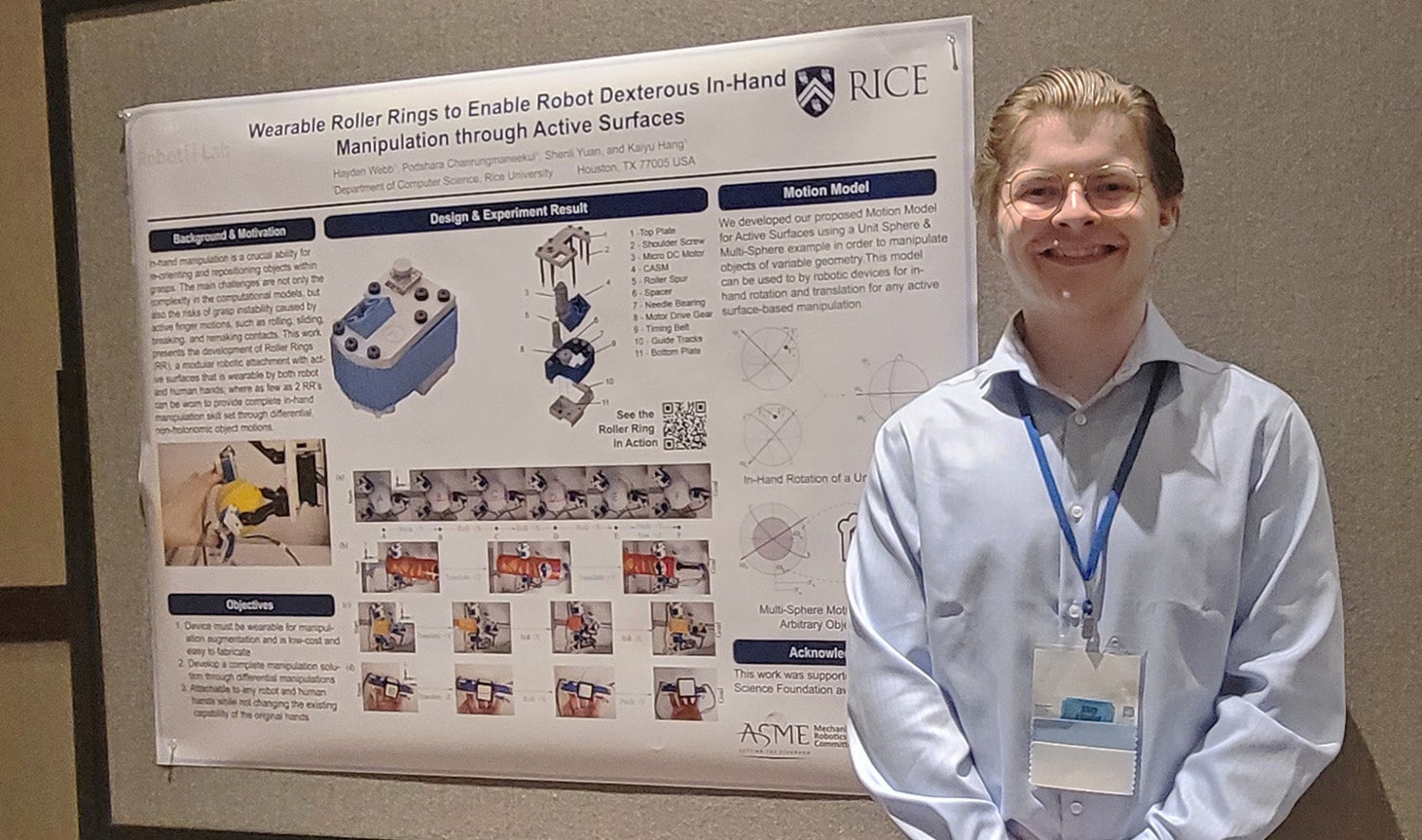
To address the issue, a Robotics Research Assistant in Kaiyu Hang’s RobotPi Lab developed Roller Rings, a modular attachment with active surfaces that can be worn by existing robot (or human) hands. The invention won third place in the international Student Mechanism and Robot Design Competition (SMRDC) organized by the American Society of Mechanical Engineers (ASME).
Existing robotic hands and grippers “can’t benefit from active surface-based manipulation without fundamentally redesigning the device,” explained undergraduate lab researcher Hayden Webb, ’25. “We had already seen significant, robust in-hand manipulation using active surfaces, and we wanted to transfer this idea over to other devices,” he said. In his competition poster, Webb states that as few as two of these Roller Rings can provide “a complete in-hand manipulation skill set” when they are attached to an existing robotic hand.
The SMRDC comprises two rounds. Webb’s was chosen as one of the top six projects among dozens of entries in the undergraduate category, and he was invited to attend and present at the International Design Engineering Technical Conferences & Computers and Information in Engineering Conference (IDETC-CIE) in August.
“SMRDC is a very competitive international competition,” said Hang, an Assistant Professor of Computer Science and Director of RobotPi Lab, who advised Webb on the design. “Students from top universities all over the world submitted their robot designs and demonstrated a wide variety of novel and interesting ideas,” he continued. “Based on the high standards upheld by the organizing committee, SMRDC is considered one of the most challenging robot design competitions for engineering students in the world.”
Hang “guided my design work in the conceptual stages of the roller rings,” said Webb, and “was instrumental in helping my understanding of the more conceptual components of the design,” such as the associated motion model, he said.
The associated motion model was, Webb says, “The biggest challenge in developing [the Roller Rings.] Understanding how to validate what we were seeing and applying said validation to perform even more manipulation was difficult, but ultimately rewarding in the end.”
This was Webb’s first time entering the SMRDC, which he’d read about in a department newsletter. “I thought it would be a great opportunity to compete,” he said.”It was a mixture of hoping and surprise that I placed. I went up against some incredible teams and projects, so while I had confidence in my own work, it was still nerve-racking regardless.”
Hang was “very excited when I heard that Hayden won the third place in this competition,” but admitted that “before we knew the result, I was already very confident that Hayden's work was one of the best, and he deserved a great recognition.”
Hang said ASME’s SMRDC “gives engineering students who are interested in pursuing research in robotics and mechanism designs a high-standard platform to not only compete on designs, but also share their ideas and research experiences to build a collaborative environment.
“Being qualified to participate in this competition, and especially winning an award, is a great encouragement for these future scientists and engineers to keep going forward in this field.”